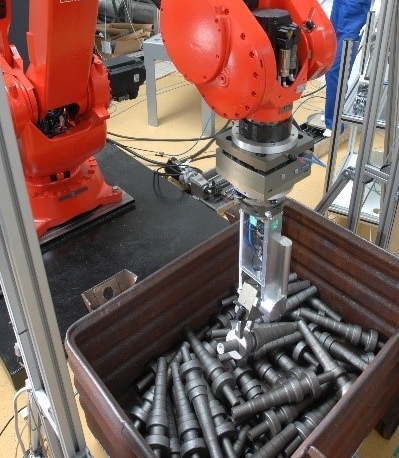
By the use of powerful simulation tools for the economical and time-efficient virtual learning of AI robot manipulation skills in handling and assembly the project Sim4Dexterity strives to lower two major obstacles in robot utilization for end-users and systems integrators to boost automation capabilities in production:
- Automatic and economic robot learning and self-teaching of new robot skills
→ effects cost savings, increased flexibility, and independence of robot programming experts - Virtual feasibility studies and virtual commissioning
→ effects planning certainty and security of investments, cost savings, and minimized interruption of production
Thus, the project results represent the first step towards the implementation of processes that could not previously be automated economically and the flexibilization of robot manipulation capabilities.
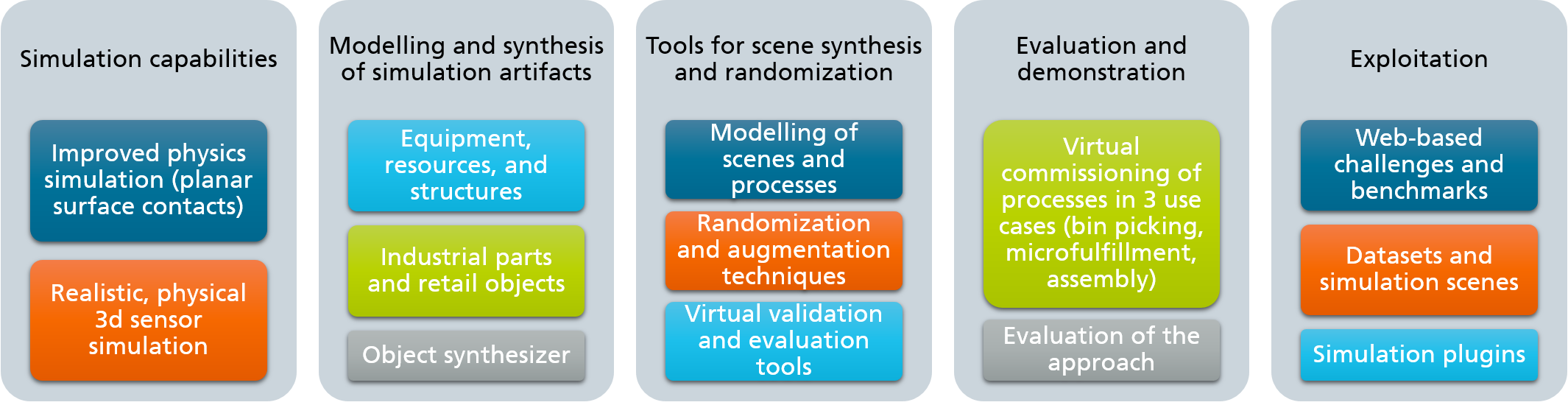
Major exploitation goals of the project partners are the use of these tools for developing better AI manipulation technologies, for conducting virtual validation and commissioning, and for creating scientific challenges and impartial industrial benchmarks for common handling tasks.