The Challenge
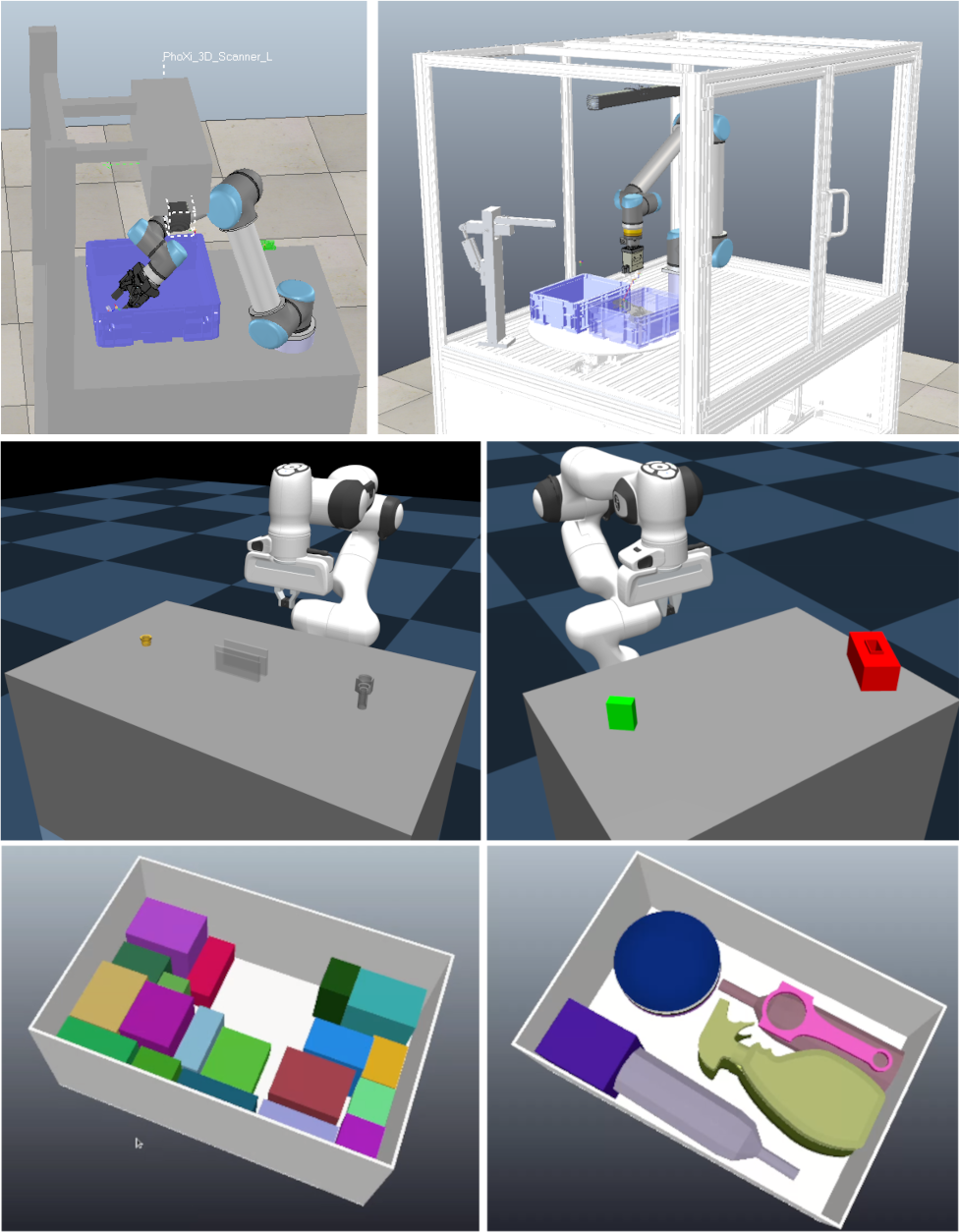
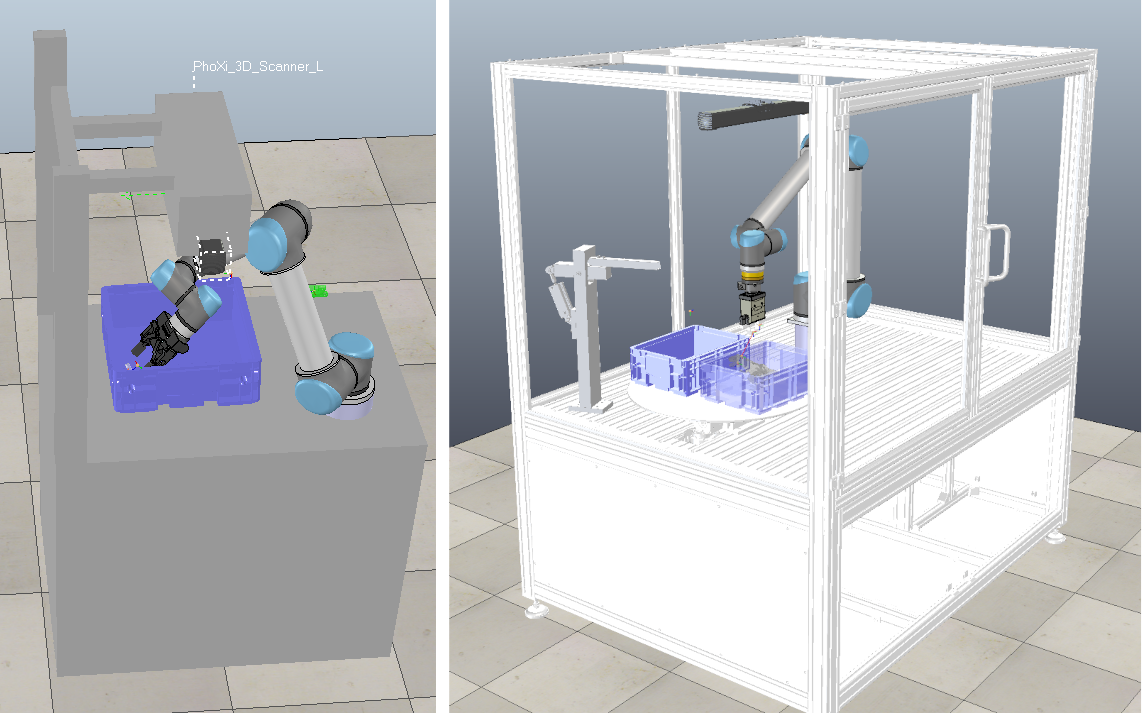
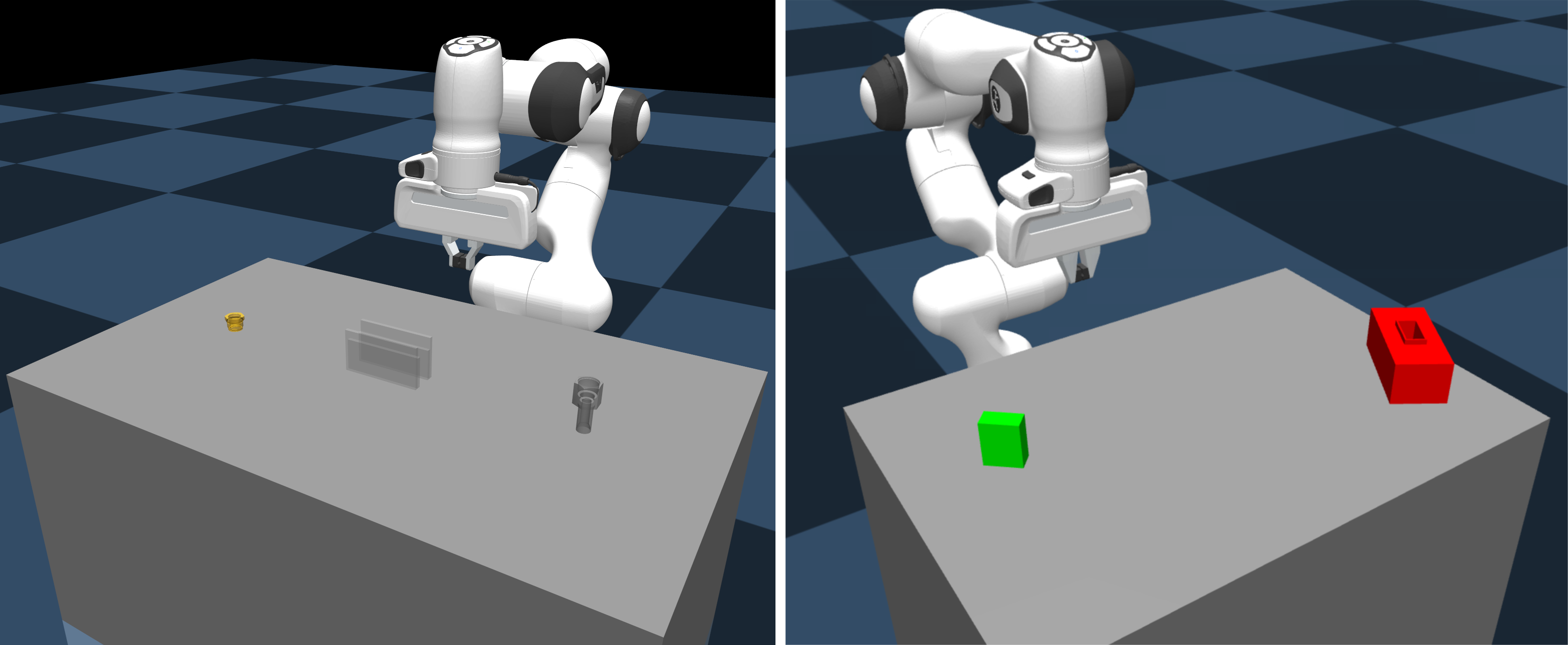
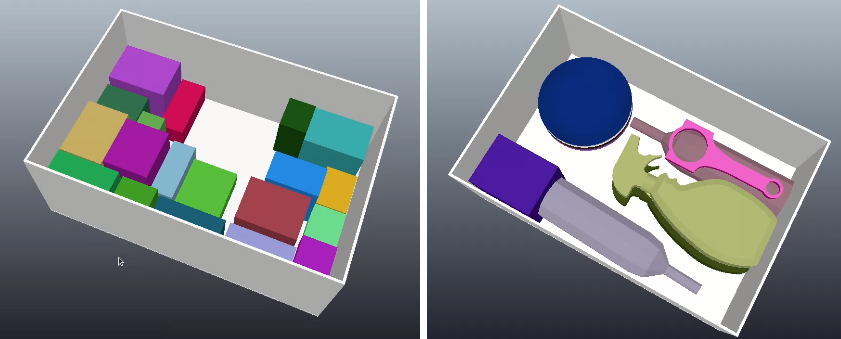
The Virtual Manipulation Challenge aims to reduce the gap between robotic simulation and real-world setups, providing the possibility to train robot behavior for complex manipulation scenarios first in simulation and later transferring the learned policy seamlessly to the real-world setup. The challenge addresses three different manipulation tasks frequently occurring in automation industry: (i) picking individual objects from heavily cluttered bins, (ii) assembly by screwing and plugging, and (iii) stacking. These scenarios offer the opportunity for researchers and industrial professionals in the field of autonomous robotic manipulation to apply their approaches to ambitious real-world industrial use cases provided by internationally renowned industrial sponsors.
The challenge and award ceremony will be held at the 2023 IEEE International Conference on Robotics and Automation (ICRA 2023) on May 29 - 03 June, 2023 in London, UK.